



Posted January 17, 2017
Philip Sabes, Ph.D., University of California at San Francisco

Philip Sabes, Ph.D., University of California at San Francisco.
Photo provided by Dr. Philip Sabes
Photo provided by Dr. Philip Sabes
With support from an FY13 Spinal Cord Injury Research Program (SCIRP) Investigator-Initiated Research Award, Dr. Philip Sabes from the University of California at San Francisco is trying to teach animals to learn to use artificial proprioception, the feeling of where the body is in space, with the goal of developing a learning-based approach for providing artificial proprioception for spinal cord injury (SCI) patients. Over 250,000 people in the United States suffer from SCI. People with SCI typically lose their ability to move their limbs and often lose sensation in their limbs as well. Proprioception is one component of that sensation, and is particularly important for fluid, effortless, and robust movement control.
In a pilot study, Dr. Sabes and his postdoctoral fellow Joseph O'Doherty successfully taught Rhesus macaques to make reaches guided by multichannel intracortical microstimulation (ICMS) of the primary somatosensory cortex (S1). He showed that congruency between ICMS and vision was sufficient for the macaques to learn to complete the task with the artificial signal alone and to naturally integrate it with vision.
Dr. Sabes' pilot animal model study demonstrated the power of a learning-based approach to artificial sensory feedback, which he is now extending to the problem of delivering artificial proprioceptive feedback from a brain machine interface (BMI). BMIs establish direct communication between the brain and artificial actuators. As such, they hold considerable promise for restoring mobility and communication in patients suffering from severe body paralysis. He hypothesizes that adding proprioceptive feedback from a prosthetic device will lead to substantially better and more natural BMI control for SCI patients. He also expects that proprioceptive feedback will increase the sense of "embodiment" of the device, thereby improving the quality of the user's experience.
Preliminary results in this animal model showed that after multiple training sessions, the accuracy of BMI-controlled movement of the virtual limb significantly improved, suggesting that the brain is learning to interpret artificial patterns of electrode activation and to use such patterns to guide movement. The successful replication and expansion of these experiments will have a significant impact on BMI technology development and could eventually enable SCI patients to move limbs and/or use assistive devices with accuracy and agility that approach natural levels.
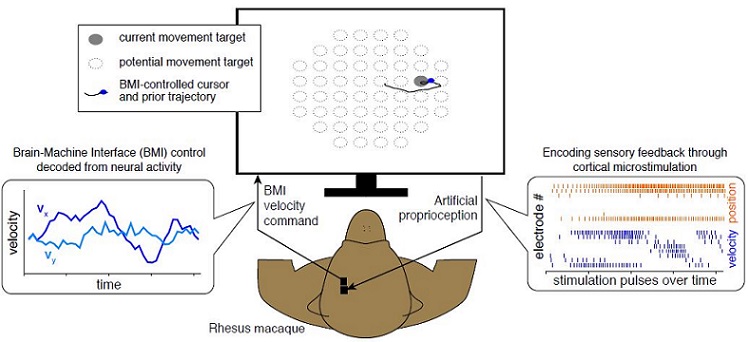
Using artificial proprioception to improve movements of BMI-controlled virtual limb
Video of a closed-loop BMI with electrical stimulation feedback of position and velocity
Left: red circle is controlled directly by brain activity to acquire a sequence of targets (green circles); blue circle indicates the position of the actual hand, which is held stationary.
Right: brain activity (top) is decoded into position and velocity (middle) and feedback about position and velocity are provided back to the brain through patterns of electrical stimulation (bottom).
Links: